前言
之前写过一个基于仿射变换,进行图像旋转的例子。今天这个名字比较绕,其实就是SUFT算子选点,然后进行点的匹配,基于匹配计算变换矩阵,最后基于变换矩阵进行图片纠正,是Opencv应用于遥感的简单小尝试。
代码
/*
作者:山科_xxin
时间:2017-03-27 22:53:11
功能:<a href="https://www.ixxin.cn/tag/opencv/" title="查看更多关于Opencv的文章" target="_blank">Opencv</a>基于SUFI算子选点,匹配,<a href="https://www.ixxin.cn/tag/%e4%bb%bf%e5%b0%84%e5%8f%98%e6%8d%a2/" title="查看更多关于仿射变换的文章" target="_blank">仿射变换</a>纠正图片
类别:<a href="https://www.ixxin.cn/tag/opencv/" title="查看更多关于Opencv的文章" target="_blank">Opencv</a>函数练习
*/
#include <iostream>
#include <string>
#include <opencv2\opencv.hpp>
#include <opencv2\highgui\highgui.hpp>
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/nonfree/nonfree.hpp"
#include "opencv2/legacy/legacy.hpp"
using namespace std;
using namespace cv;
using namespace std;
using namespace cv;
int maopao(vector< DMatch > matches)
{
int msize = matches.size();
float tmp;
for(int i = 0;i<msize-1;i++)
for(int j = 0;j<msize-1-i;j++)
{
if(matches[j].distance>matches[j+1].distance)
{
tmp = matches[j].distance;
matches[j].distance = matches[j+1].distance;
matches[j+1].distance = tmp;
}
}
for(int i = 0;i<msize;i++)
cout<<matches[i].distance<<" ";
return 0;
}
int main()
{
cout<<"SUFT算法:"<<endl;
Mat srcImage1 = imread("G:\\opencv\\b1.JPG",1);
Mat srcImage2 = imread("G:\\opencv\\b11.jpg",1);
if( !srcImage1.data || !srcImage2.data )
{
cout<<"打开错误"<<endl;
return false;
}
else
{
//if(srcImage2.data)
}
double t = getTickCount();
int minHessian = 700
SurfFeatureDetector detector( minHessian );
std::vector<KeyPoint> keyPoint1, keyPoints2;
detector.detect( srcImage1, keyPoint1 );
detector.detect( srcImage2, keyPoints2 );
cout<<"图像1特征点个数:"<<keyPoint1.size()<<endl;
cout<<"图像2特征点个数:"<<keyPoints2.size()<<endl;
SurfDescriptorExtractor extractor;
Mat descriptors1, descriptors2;
extractor.compute( srcImage1, keyPoint1, descriptors1 );
extractor.compute( srcImage2, keyPoints2, descriptors2 );
t = ((double)getTickCount() - t)/getTickFrequency();
cout<<"SIFT提取点算法用时:"<<t<<"秒"<<endl;
BruteForceMatcher< L2<float> > matcher;
std::vector< DMatch > matches;
matcher.match( descriptors1, descriptors2, matches );
maopao(matches);
float min_dist = 100;
float max_dist = -100;
for(int i = 0;i<matches.size();i++)
{
float dist = matches[i].distance;
if(dist < min_dist) min_dist = dist;
if(dist > max_dist) max_dist = dist;
}
cout<<"Match个数:"<<matches.size()<<endl;
cout<<"最小距离"<<min_dist<<endl;
cout<<"最大距离"<<max_dist<<endl;
Point2f srcTri[3];
Point2f dstTri[3];
for(int i = 0;i<3;i++)
{
dstTri[i] = Point2f(keyPoint1.at(matches[i].queryIdx).pt.x,keyPoint1.at(matches[i].queryIdx).pt.y);
srcTri[i] = Point2f(keyPoints2.at(matches[i].trainIdx).pt.x,keyPoints2.at(matches[i].trainIdx).pt.y);
}
vector<DMatch> goodMatches;
for(int i=0; i<3; i++)
{
goodMatches.push_back(matches[i]);
cout <<"第一个图中的"<< matches[i].queryIdx<<"匹配了第二个图中的"<<matches[i].trainIdx<<endl;
}
//cout<<"goodMatch个数:"<<goodMatches.size()<<endl;
/*
//限定点数
int point;
point = 30;
nth_element(matches.begin(), //初始位置
matches.begin() + (point-1), //排序元素的位置
matches.end()); //终止位置
//移除之后所有的元素
matches.erase(matches.begin() + point, matches.end());
*/
Mat imgMatches;
drawMatches( srcImage1, keyPoint1, srcImage2, keyPoints2,goodMatches, imgMatches,Scalar::all(-1),Scalar::all(-1),Mat(),2);//进行绘制
Mat warpMat( 2, 3, CV_32FC1 );
Mat dstImage_warp = Mat::zeros( srcImage2.rows, srcImage2.cols,srcImage2.type() );
warpMat = getAffineTransform( srcTri, dstTri);
warpAffine(srcImage2, dstImage_warp, warpMat, dstImage_warp.size());
namedWindow("MatchSUFT",1);
imshow("MatchSUFT", imgMatches);
imshow("还原",dstImage_warp);
waitKey(0);
return 0;
}
结果
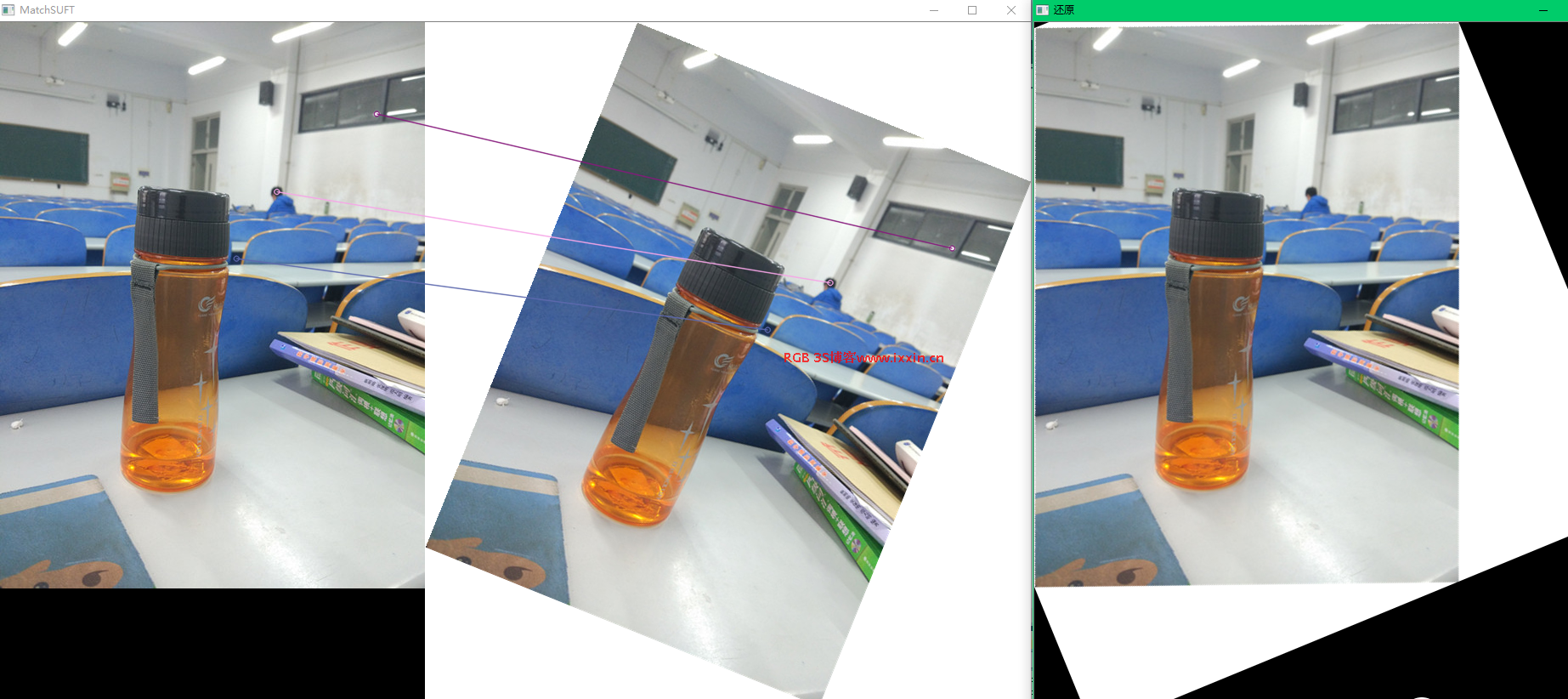
有个缺点,就是我没有对黑边,白边进行处理,其实是可以让他居中的,应该可以的,别打脸。。。。