图像融合—基于RGB-HLS变换原理
第一步:打开数据
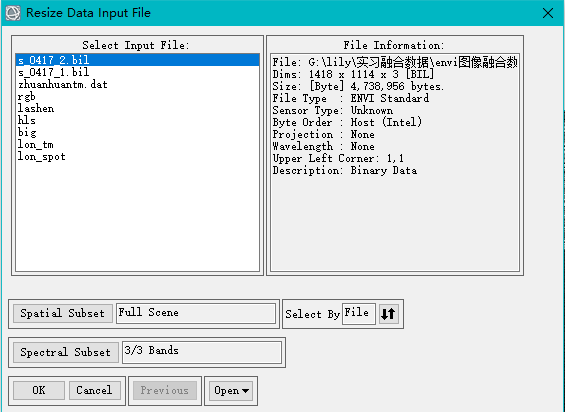
File-open As-SPOT-geoSPOT,分别选择两幅图像。打开如下:
右键图像可以change RGB bands,通过选择不同波段来实现不同的显示。
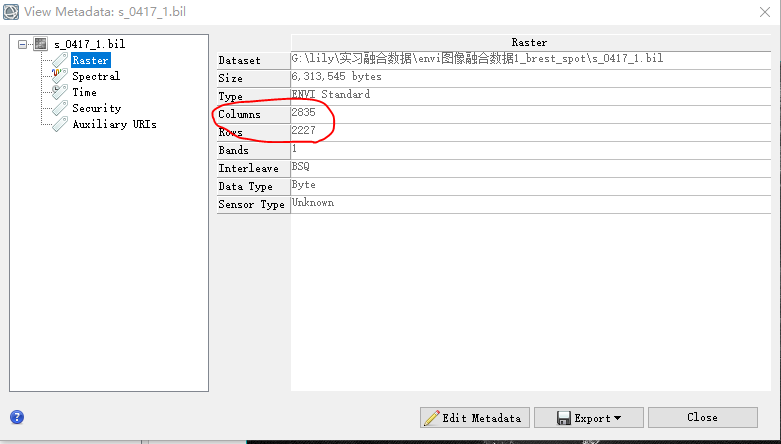
双击图像可以查看其行列数。首先我们来看那幅SPOT图像(灰色、比较大的那个)的行列数,如下:
第二步:几何配准
将低分辨TM多波段影像放大使其与高分辨SPOT影像行列数一致,从而使其几何位置相对应,即将TM数据重采样。
Toolbox-Raster Management-Resize Data工具,选中多波段TM影像。
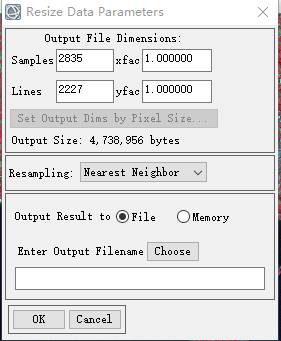
行列号改为SPOT的行列号(上一步通过双击查看到),采样方法选择Nearest Neighbor,
选择存储位置。
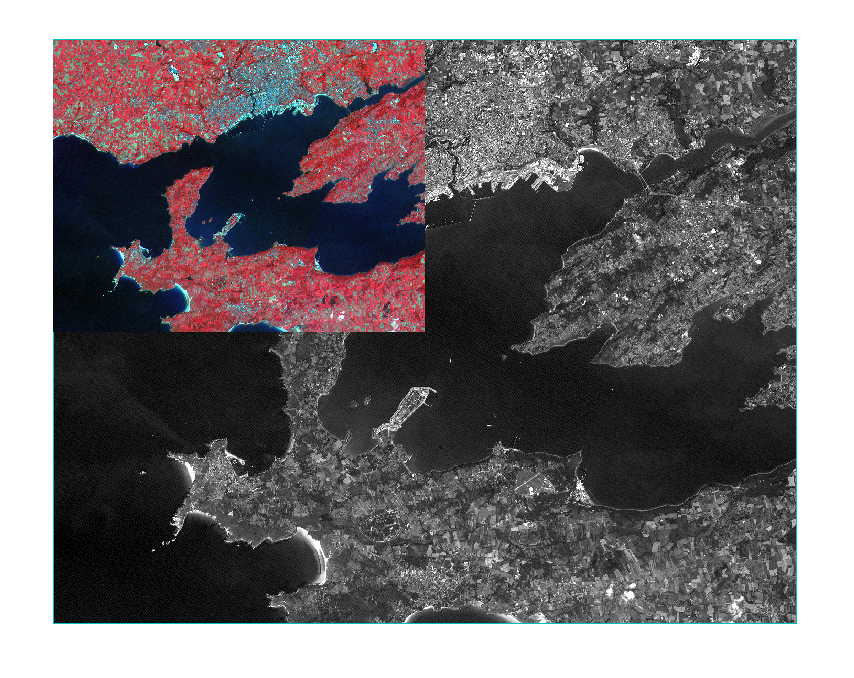
结果:

我们发现TM图像变得跟SPOT一样大了。
第三步:RGB-HLS变换
Toolbox-transform-Color Transforms-RGB2HLS
对应选择,如图所示。
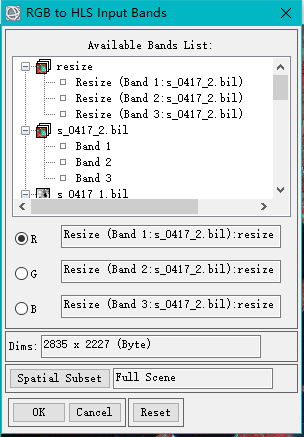
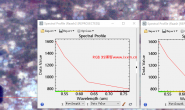
选择存储位置,保存即可。结果如下:
![]()
右键点击quick stats:
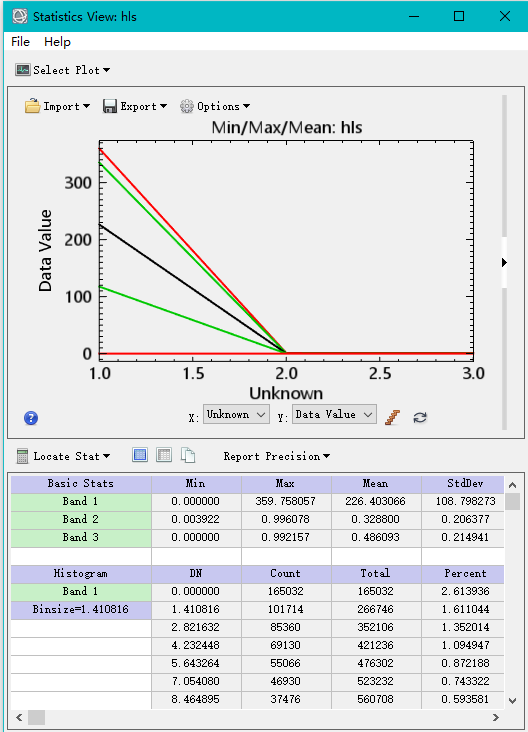
观察其每个波段的最大值,最小值。
第四步:拉伸spot数据到0-1 之间
Toolbox-Raster Mangement-Stretch Data
选择SPOT影像,点ok。
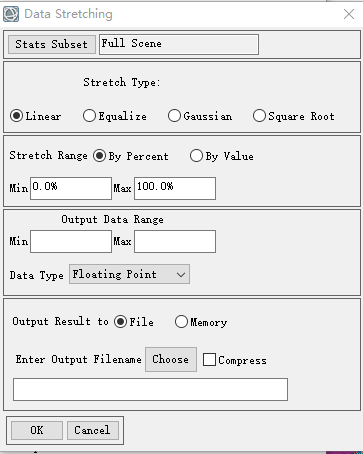
Output Data Range min:0 max:1,其余默认。选择存储位置
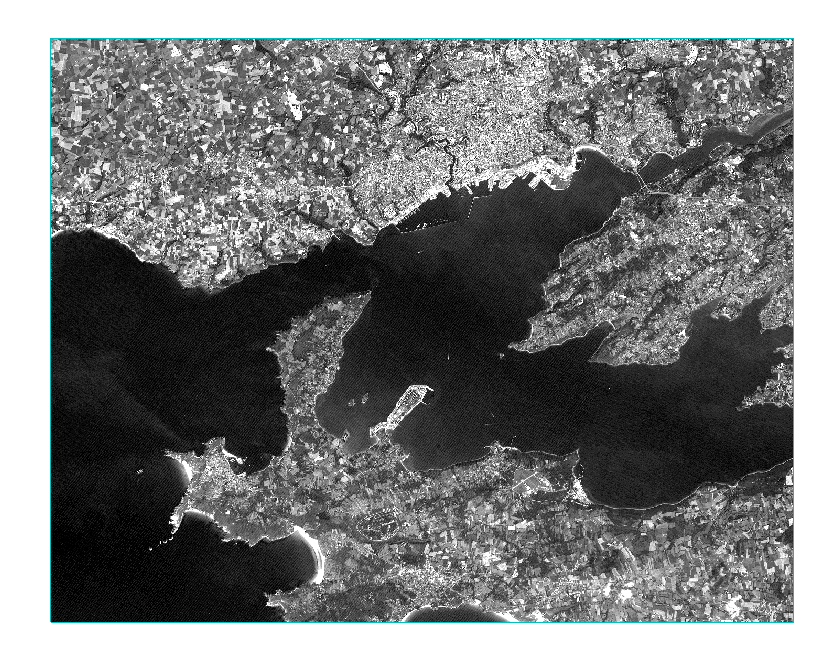
结果如下:
第五步:HLS-RGB反变换。
Toolbox-transform-Color Transforms-HLS2RGB
H属性对应变换后的H属性。S对应变换后的S属性。L对应拉伸后的spot数据。点击OK,保存输出文件。
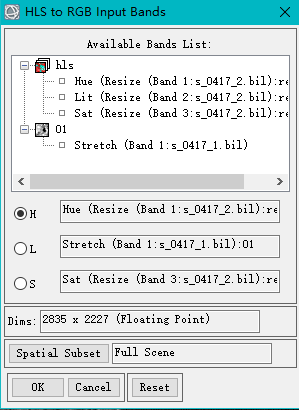
点击ok,选择存储位置,保存即可。
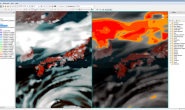
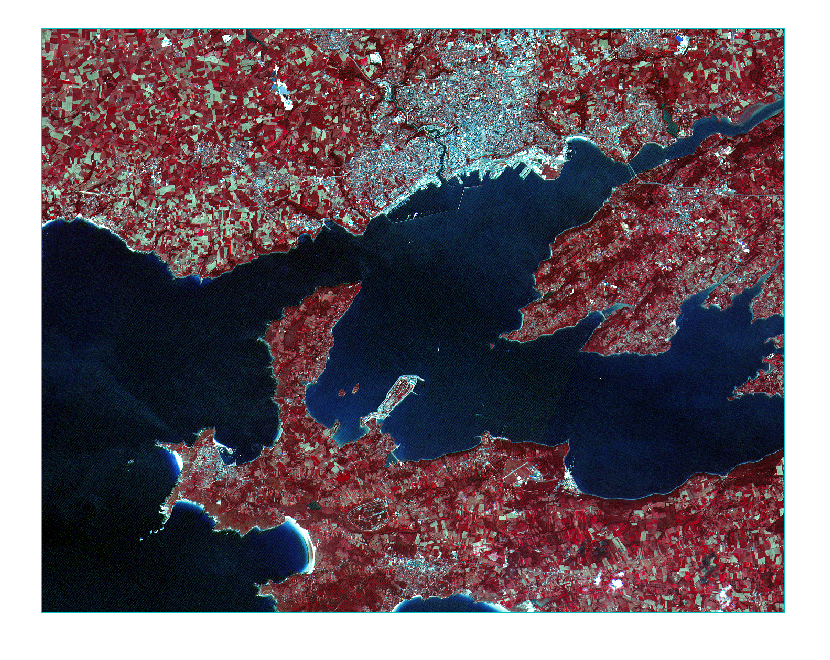
结果如下:
数据下载
点此下载
密码:xomz